
Mechanical Power Transmission Losses Monitoring
Mechanical Power transmission Losses Monitoring
In belt drives, power losses occur due to a combination of speed losses and torque losses. Speed losses result from sliding of the belt relative to the pulley, which leads to a decrease in the angular velocity of the driven pulley, and thus in the transmitted power.
ABSTRACT One of the concerns in belt drive transmissions is the relative sliding (slip) of the belt with respect to the pulley, which results in speed loss, i.e. decrease in the angular velocity of the driven pulley. In this study, the slip behavior of a V-ribbed belt drive with two equalsized pulleys is investigated by utilizing several experimental methodologies. The individual effects of belt-drive parameters on speed loss are determined using one-factorat-a-time (OFAT) test method. The relation between the belt-drive parameters and the speed loss is found using response surface method (RSM). Afterwards, the optimum operating conditions are determined via a design optimization procedure. In order to validate the response surface curve, experiments are conducted with arbitrary operating conditions and the measured and predicted values of speed loss are compared. The predictions of the response surface model are also found to be in good agreement with the empirical results presented in the literature. Furthermore, the predicted model looks reasonably accurate based on the analysis of variance (ANOVA) and the residual analysis. Using the response curve, one may estimate the degree of speed loss for similar beltdrives with operating conditions within the range considered in the present study.
Introduction
Some researchers theoretically examined the slip behavior in belt drives. In 1874, Reynolds showed that torque transmissions between pulleys involved speed losses due to belt’s elastic creep. Gerbert explained the mechanism of slipping by dividing the arc of contact between belt and pulley into sticking (non-slipping) and slipping regions. The belt was treated as a string and the mechanism of elastic creep of the belt along the pulley was shown to yield a slip arc at the exit region of the pulley, where the entire transition from the high to low tension occurred. In the remaining contact region, commonly referred to as the stick (non-slip) arc, the belt was shown to stick to the pulley without slipping with no change in tension. Although the classical creep theory explains how belt slip occurs to a reasonable extent, speed losses encountered in practice are larger than predicted by extensional creep, particularly for thick flat-belts, V-belts, and V-ribbed belts. Firbank proposed a theory where shear strain in the belt envelope was assumed to be the determining factor on the drive behavior. The difference between the two theories is that the creep theory assumes that belt behavior is governed by the elastic extension and contraction of the belt as opposed to the shear theory. However, both of the assumptions are too strict to explain the slip behavior and the slip regions along the contact region between the belt and the pulley. Firbank claimed that slip occurred only at the exits of the driver and driven pulleys. The remaining region over the entire arc was taken as the real arc of contact as defined by Gerbert. Gerbert proposed an analysis that considered both flexural rigidity and compressibility of the belt and assumed that belt speed differences in the entry and exit regions were observed due to the change in the radius of the curvature of the belt, which meant that belt extensibility was not the only factor to explain the slip behavior. Sorge etal. defined the arc of contact as the power transmitting part of the belt and claimed that there was almost no tension variation in the contact region.
One of the great advantages of using drive belts is their ability to transfer power to relatively large axial distances without much loss in performance.
Energy loss during power transfer from the drive to the driven pulley is a negative feature of all drives. It manifests itself by reducing output power and, most notably with the use of V-belts, also generates heat, which has a negative impact on the lifespan of all components.
A review of aspects of the mechanics of contact of belts on pulleys is presented. Power loss in flat and V belt drives and tooth loading in timing belt drives is related to belt tension and torque transmission, to belt elastic and friction properties, and to pulley radius and arc of contact. Particular attention is given to the effects of belt carcass distortion, in addition to the generally recognised effects of belt tension member extension. Problems in the mechanics of flat and V belt power transmissions are identified the solution of which would aid the rational design of efficient drive layouts.
Belt drives are a widely used transmission system that provide an easy way to achieve the desired speed of driven equipment through selection of pulley sizes at the design stage, with some flexibility to change the ratio later by changing pulleys if requirements change. They are also cheaper and simpler than gearboxes, and can give some short-term protection against shock loads or massive overloads.
The downside of vee-belt drives is that they are inevitably subject to wear as the belt rubs against the pulley on entry and exit from the main driving contact area. This wear can be significantly accelerated by poor alignment of the pulleys and poor tensioning of the belts.
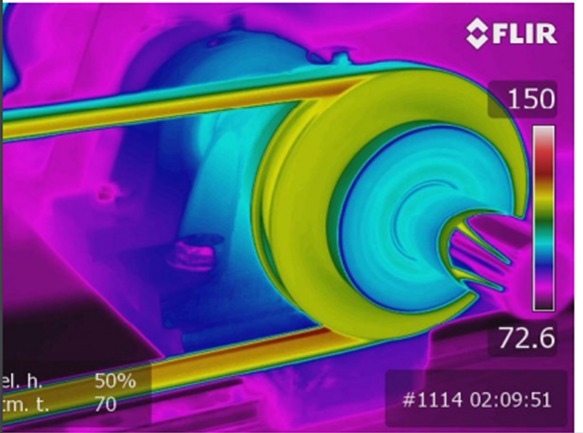
As the belt wears, the tension on the belt reduces, leading to progressively increased slipping, which in addition to accelerating the wear rate, causes increased temperature which in severe cases can reduce bearing life. The temperature rise is an indication of energy being wasted – and this can be up to 10% of the energy coming from the driver. Where the driver is an electric motor, this means you are using more electricity, increasing the cost in direct proportion to the amount wasted.
The loss of efficiency deteriorates gradually and occurs long before the drive stops driving the load altogether, so there is little obvious prompt to do anything – unless you have a readily visible display – such as this one:
{kind=link}
{kind=link}
{kind=link}
{kind=link}